咨询电话
我们在前期有说过影响无人机飞行的一些因素,其中包含气象因素及信号因素。考虑好着两点以后并不代表我们就可以放松警惕了。由于无人机的飞行高度有限,在一些特殊的环境中,很容易受到地面情况的影响,从而影响飞行平安。在飞行无人机时,时刻关注地面情况,也是保障无人机飞行平安的重要一环。下面西宁无人机培训的小编就为大家介绍一下影响无人机飞行的地面因素。
影响无人机飞行的地面因素一:障碍物
地面建筑与树木对无人机的干扰之前有提到过,会产生乱流、遮挡GPS信号、影响磁罗盘等。
但除了上述影响之外,对无人机飞行造成直接的影响,那就是无人机在操作失误的情况下,与建筑和树木等障碍物发生撞击。要特别注意的是,很多撞击发生在操作者使用自动返航功能时,因此我们有要弄清楚自动返航的工作流程,以及如何避免操作失误。
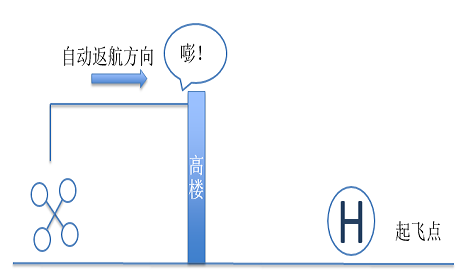
自动返航的工作流程是:无人机先在当前位置垂直上升到预定返航高度,再从返航高度水平前进至返航点,在返航点上空降落。
在设置返航高度时,如果返航高度低于周围建筑的高高度,在无人机返航过程中将有可能撞到建筑物。如图:
而在无人机自动返航过程中,由于用户的操作不当,发生事故的情况也屡见不鲜,我们再来一起看一下,当自动返航功能启动时,无人机工作的一些特殊情况。
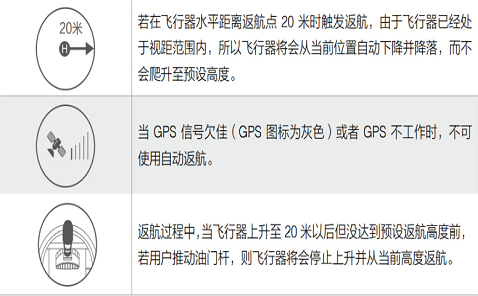
在上面关于自动返航的描述中,我们需要重点关注一个关键距离:“20m”。
一是“无人机水平距离返航点20m”,此时按自动返航会直接原地降落;之前也出现过飞手把无人机飞到面前的湖面上,心血来潮想尝试自动返航,结果眼睁睁看到飞机原地降落到水中的“惨案”;
二是“无人机上升至20m以后但没达到返航高度前”,此时如果乱打杆,会造成无人机停止上升直接水平返航,此时很容易发生事故。
所以说,自动返航要是想用得顺手,还真得多加注意。所以在这里友情提示:无论科技发展到什么程度,练好无人机的操作技能才是硬道理。
影响无人机飞行的地面因素二:视觉差
除了地面上的障碍物以外,我们自己在地面上操作无人机时,很容易出现视觉差,对飞行平安造成影响。
不知道小伙伴们在飞行无人机的过程中会不会遇到这种情况:明明离障碍物还有一段距离,但是总感觉飞机要撞上去了;感觉飞机飞到了预期的位置,结果一看屏幕,发现还差得很远。
发生这种情况其实很正常,实际上,操作人员对于较远距离的障碍物的实际距离以及无人机与障碍物距离往往判断错误,这种现象我们称之为视觉差,视觉差会导致无人机与障碍物发生撞击从而造成无人机的损坏,目前没有很好的办法去解决,只能多积累经验。在这里推荐给各位小伙伴一个自己在家就能练习克服视觉差的方法,叫做对尾矩形航线,就是保证无人机在尾部始终对着操作者的情况下,在一个空地上画出一个矩形,这个操作可以帮助你联系对位置的判断以及操作无人机保持稳定飞行的能力。
那么关于影响无人机飞行平安的因素到这里就全部介绍完毕了,希望各位伙伴都有所收获?希望大家都能提高对无人机飞行平安的重视程度,实现“飞的出去,飞的回来”目标,真真正正享受无人机带来的便捷与快乐。
青海俊飞翼科技有限公司

微信二维码
17697161414青海俊飞翼科技有限公司专业从事青海无人机,服务项目包括开发及生产销售西宁森林灭火无人机、民用无人机以及从事西宁无人机培训等。
青ICP备2020001104号 | 网站地图 XML地图